现在一些汽车的自动泊车功能好用吗?真的可以实现自己停进车位吗?
从智能驾驶未来的使用场景来看,城市道路、高速道路、停车场将会是未来智能驾驶实现闭环的三大场景。在停车场这个场景当中,自动泊车又是核心的功能点。随着感知技术和车辆控制技术的不断发展,自动泊车功能以及越来越成为一种实用的产品功能,并且配置在越来越多的车型上,包括我们大众家族旗下的产品。
在智能驾驶功能当中,定位感知、路径规划和车辆控制是三个主要的环节:
· 当人类来到一个陌生环境,需要做的第一件事情就是观察。我们常常会首先通过环境的观察锁定自己的位置,然后利用眼睛和耳朵观察环境。对于智能驾驶功能来说亦是如此。定位和感知对于智能驾驶功能来说至关重要,但是汽车并没有五官,所以我们需要通过使用感知硬件来让汽车观察周围的环境。在感知硬件的发展过程中,我们从广袤的大自然当中获取到了灵感。鱼类为了更好的生存-捕捉猎物和躲避天敌,进化出了如期可以转动超过180度的摄像头,获得了超广角的视觉,这启发人类发明了鱼眼摄像头。蝙蝠在夜晚飞行通过发出超声波来探测环境和距离,这启发我们发明了超声波雷达。而摄像头和超声波雷达就是车辆在自动泊车过程当中,用来感知环境和定位的利器。
· 路径规划是在车辆充分感知环境之后,通过感知进行环境中的特征提取,然后建立基于特征的地图,并在地图中依照可达空间进行初步的路径规划。在特征提取的过程中,会识别车位、车道线、立柱和车辆等特征元素。然后根据汽车和车位的相对位置,计算出最优路线,避开障碍物,将车辆顺利停入车位。
· 车辆控制是基于对于路径的规划,通过对于车辆转向、制动、油门三项行驶功能的控制,让车辆按照原定的路线进入车位。与此同时,在泊车的体验上,要做到尽可能的又快又稳。

IQ. 泊车管家
IQ. 泊车管家是我们大众集团根据用户的日常使用场景开发出的一套智能泊车系统。其可以实现平行车位停车和垂直车位停车。智能泊车功能(Intelligent Parking Assist)功能已经在ID.系列车型上上线,后续还会推出远程泊车辅助功能。
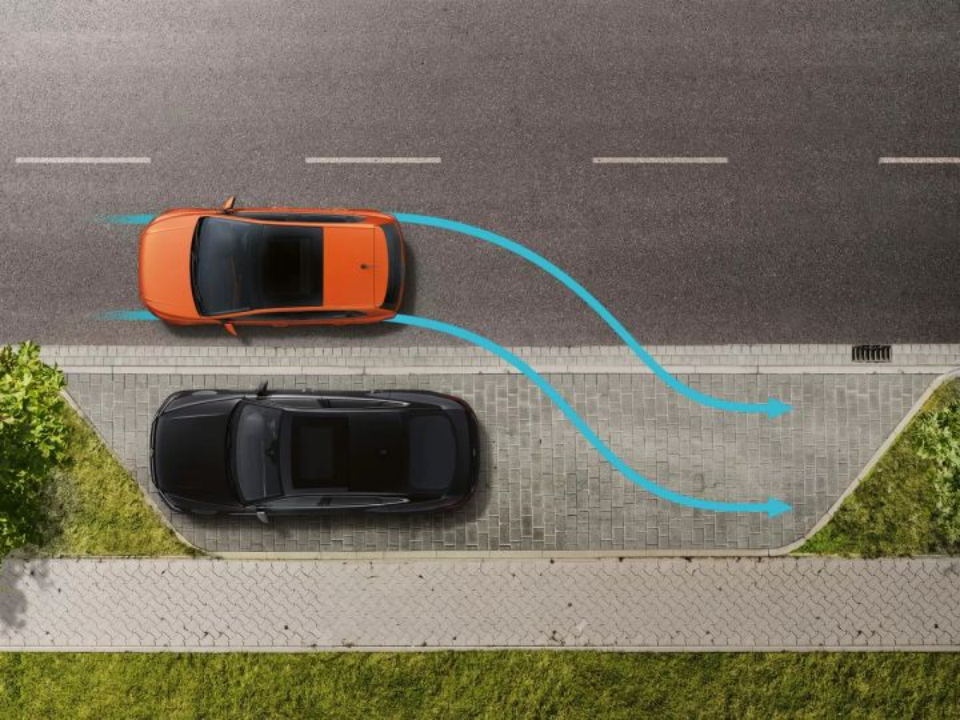
在整个泊车场景中,智能泊车系统会尽可能的减少用户的操作流程。当想要平行停车时,只需按下停车辅助按钮,在车辆的超声波传感器会对于空间进行探测,确定空间的大小。
在之后的停车过程中,在中控屏幕上选择“开始”。智能泊车系统会在在多功能显示屏上显示其预期的倒车路径,然后将汽车置于最佳起始位置并自动转向进入车位。与此同时,驾驶员保留接管车辆的权利,在停车的过程中用户始终可以通过操作油门或制动器来操纵车辆,通过接管的方式停车活终止系统操作。在更小的停车空间里,停车辅助系统会通过一次或者多次的车辆移动来帮助进入车位。同时驾驶员同样保持对于车辆的接管的权力。
在整套泊车辅助功能的工作过程中,内置在车辆前后的超声波雷达是帮助车辆进行感知识别的关键,他们的探测距离最远4米,超声波雷达通过回声探测仪的原理来检测障碍物和汽车之间的距离,如果离障碍物的距离过近,也会发出警告音。
智能泊车系统的功能利益点旨在于通过智能化的功能将用户的蛮杂的停车过程中解放出来,在车辆自动泊入车位的过程中,用户可以提前进行下车前的准备,进而提高使用的便捷程度。
IQ. 360 全景
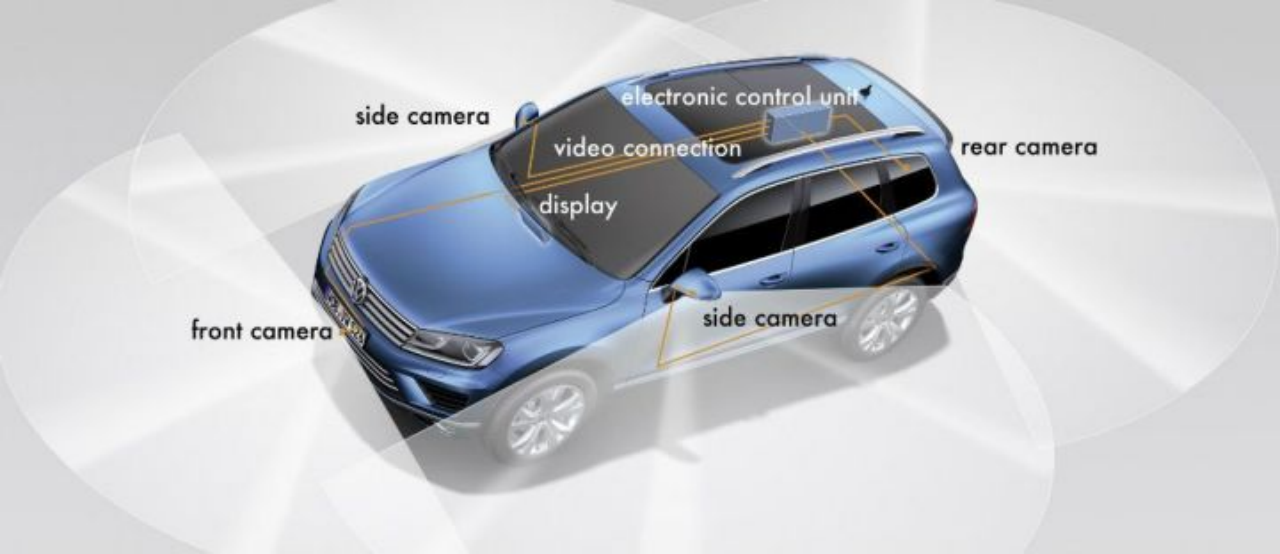
IQ. 360 全景是基于另外一个传感器-摄像头所开发出的一种行车辅助功能。车辆周围区域的全方位鸟瞰图由四个摄像头提供,这些摄像头集成在车辆中。前置摄像头位于散热器格栅中,后置摄像头安装在尾门把手中,侧面摄像头安装在后视镜中。广角摄像头可以捕捉车辆周围的整个区域,从而将驾驶员的盲点全部覆盖。
在鸟瞰图的使用过程中,可以通过触摸操作选择四个摄像头,详细查看车辆的前后左右区域。比如,向前驶出停车位或出口时,可以看到行人和骑自行车的人从侧面驶来。同时,摄像头会在中控的显示屏上提前显示其他道路使用者。在前视图模式下,可以选择上图、拆分视图、单一前视图以及带停车辅助线的前视图等等视图功能,从而方便驾驶员对于周边的环境进行感知。整个 360° 全景的功能目前已经广泛应用于大众旗下的产品车型。
总的来说,IQ. 泊车管家和IQ. 360 全景功能都是基于日常的使用场景,通过传感器感知的方式帮助用户更为便捷的感知周围环境,并提供对应的自动化功能,从而提高场景下的用户的使用体验,让用户从放心到舒心。而在未来,基于更多传感器的感知和融合会使得在三大行驶场景下的智能化程度更高,从而进一步解放乘员,从而拥抱更加便捷和智能化的未来。